Model-Based Episodic Memory Induces Dynamic Hybrid Controls
Published in NeurIPS, 2021
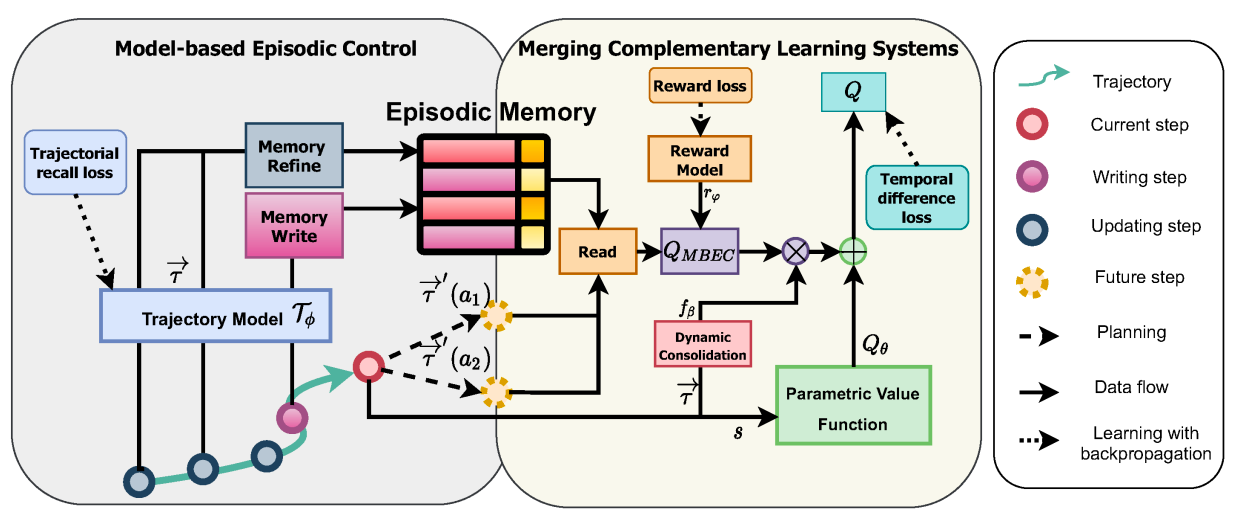
Episodic control enables sample efficiency in reinforcement learning by recalling past experiences from an episodic memory. We propose a new model-based episodic memory of trajectories addressing current limitations of episodic control. Our memory estimates trajectory values, guiding the agent towards good policies. Built upon the memory, we construct a complementary learning model via a dynamic hybrid control unifying model-based, episodic and habitual learning into a single architecture. Experiments demonstrate that our model allows significantly faster and better learning than other strong reinforcement learning agents across a variety of environments including stochastic and non-Markovian settings.
Code•Talk•Poster•Slides•PDF•Link